
About 3 Dimensional Point Cloud3次元点群って何?
PROS
3次元レーザースキャナーなどで物体や地形を計測したデータをコンピュータ上で扱う際、物体や地形は「点」の集合体【=3次元点群】として表現できます
点の1つ1つにはスキャナーからの相対的なX,Y,Z情報や、カメラの画像データから得た色の情報(RGB)を持つことができ、点の集合体【=3次元点群】によって物体や地形をコンピュータ上でわかりやすく扱えるようになります。
土木・測量や道路計測では多くの場合、計測機器からの相対距離ではなく地理上の位置が必要となります。
そのためレーザースキャナーやカメラ(画像解析)に加え、GNSS【Global Navigation Satellite System:全地球衛星測位システム】アンテナ、電子基準点等による基準座標、補正パラメータの利用、加速度/傾斜センサーなどを組み合わせ、位置を座標として算出できるシステムとして利用されています。
Various Scenes to Use3次元計測いろいろ
PROS
3次元計測機器は用途にあわせてさまざま
- 道路を走る自動車とスキャナーを一体化したMMS【モービルマッピングシステム】
- TS(トータルステーション)のように固定設置し、自動回転・旋回によって周囲の地形を収集するタイプ
- UAV【ドローン】に搭載し、空中からデータ収集するタイプ
- 工場内の検査・計測システムとして利用するタイプ
- 水中でソナーと合わせて地形・構造物が収集できるタイプ
ほかにも地下空間などでは”人の移動”にあわせた収集や、複数方向からの撮影画像から点群を算出するような方法も確立されてきています。
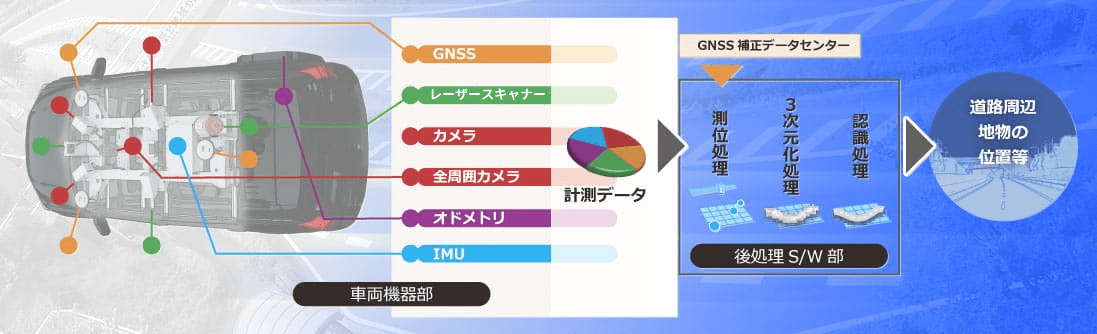
車両搭載・移動計測型

自動車に計測機器を装備し、移動しながら計測することで道路や通行可能箇所の周辺状況のデータ収集ができます。20~80km/hでの走行で高精度に計測ができるので、高速道路でも交通規制の必要なく計測ができます。
車両外部にカメラ・レーザースキャナー・GPSアンテナ・IMU(慣性計測)・オドメトリ(タイヤの回転:移動量計測)、内部に記録用PCやハードディスク・確認モニターを装備し、最大約8時間の計測、持ち帰ったデータの後処理によって3次元点群や画像データが得られます。
活用例
- 路面調査 道路ストック総点検(舗装) whatmms.com
- 計測データ ≫ 路面のオルソ画像 ≫ ひび割れ・パッチング率集計
- 計測データ ≫ 道路線形再現 ≫ 横断切り出し:わだち掘れ率算出・縦断凹凸算出
- 舗装オーバーレイ 路面現況調査 whatmms.com
- 水準マーカー測量を利用した高精度勾配補正
- 上下線計測からの合成横断 ・MMS-X640【前後のレーザースキャナー】計測
- RIEGLレーザー搭載によるASカーブエッジ抽出
- 河川全周囲画像取得 whatmms.com
- 全周囲カメラ【Ladybug】をMMS-X320・MMS-S220に搭載
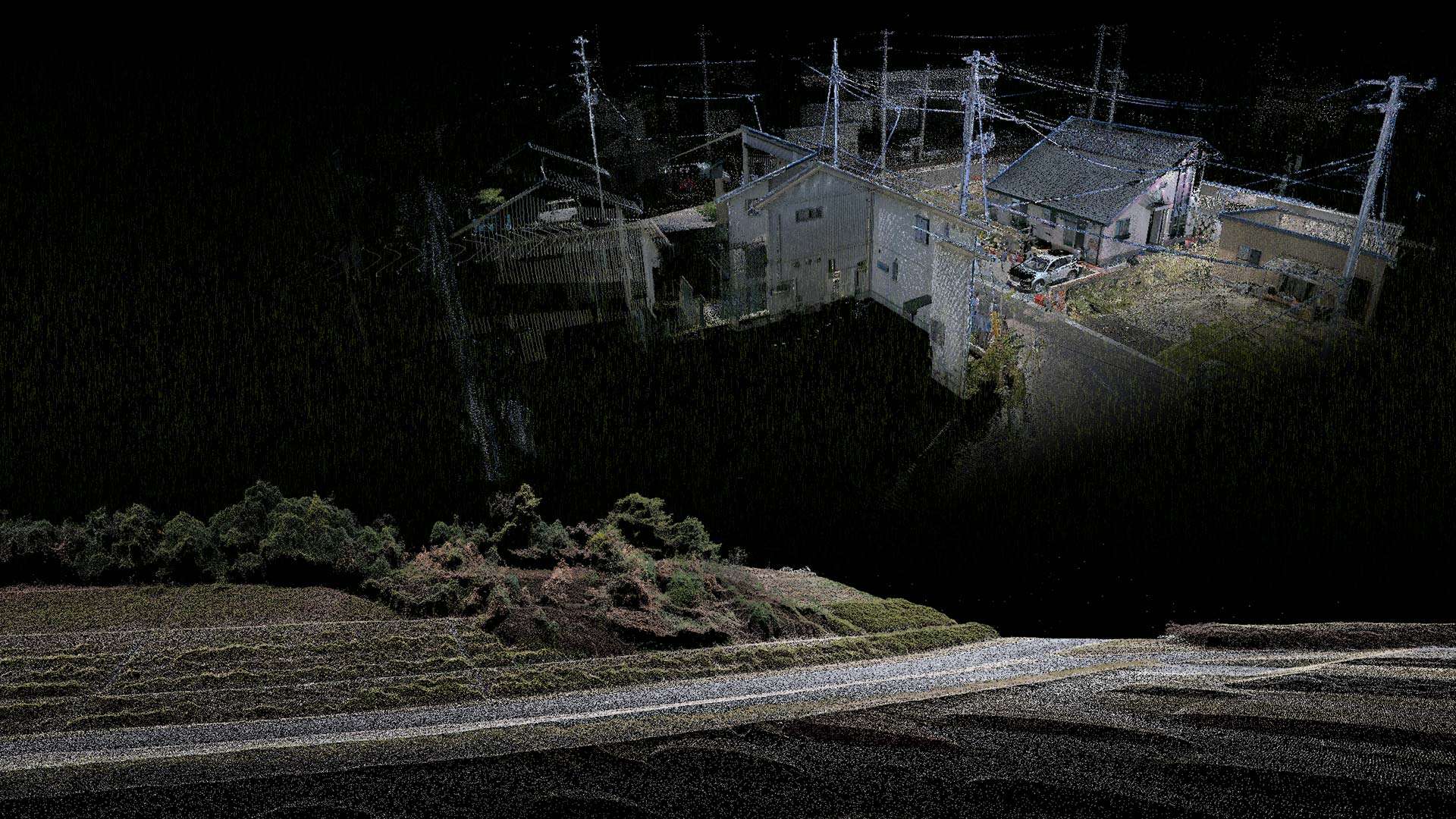
- 震災復興での活用 【PDF】
- 被害状況の記録(空間・路面)
- 震災前後の点群データ比較・変動量の可視化
- 道路情報モデル化による走行支援の研究開発
2014年4月 【PDF】 - GNSS衛星測位単独での車線認識テスト
- MMS計測+水準測量データからのナビゲーション用地図作成テスト
【測量】道路台帳図作成・道路地物計測・道路線形情報取得・道路占用調査(看板等)・標識調査
【建設】情報化施工用3次元地形収集・住民説明用データ整備(3次元CG生成)・トンネル調査(変位調査等)
【地図】高精度3D-GIS ベースマップ・絶対座標による地物データ収集
【自動車】車両モデルのバーチャル実証用リアル道路データ取得
【インフラ】電柱/電線調査・設備管理・工場内施設管理 etc.
国土地理院では平成24年に「移動計測車両による測量システムを用いる数値地形図データ作成マニュアル(案)」【PDF:国土交通省 国土地理院】を公開して以降、公共測量および基本測量における移動計測車両による測量を実施する場合の標準的な作業方法、規格の統一、成果の標準化、必要な精度の確保に資することを目的に策定されています。現在の最新規程は「作業規程の準則」【国土交通省 国土地理院】 に統合されています。
機器設置計測型
- 地上 3D レーザースキャナー
- 測量・土木・建築・施設管理など多くの分野で、地形・形状を把握するためにスキャナーを設置し 3 次元計測をします。器械から陰になる場所からも3次元点群を得たり、レーザー照射の品質が確保できるよう、複数方向からのスキャンや器械移動してのスキャンを行います。

地上に設置する3Dレーザースキャナーは土木【i-Construction】・測量【国土地理院_地上レーザスキャナを用いた公共測量マニュアル(案)平成30年3月 】などの国の規定に沿った仕様で工区内の計測・成果作成に用いるケースと、住宅建築や地下街、屋内施設、プラント、配管などを計測し、汎用的な用途に利用するケースに大別されます。
両者において重要なのは、レーザー光の特性や機器のスペックにあわせた計測をし、3次元点群の品質を確保することです。
たとえば、懐中電灯の光を近くの壁にあてると、光は小さく丸く見え、遠くの壁にあてると光の円は大きくなり薄くなります。また、少し手前の地面を照らすと円は細長くなり、遠くの地面を照らすほど長細く広い範囲を薄く照らします。
地上レーザースキャナーのレーザー光も、照射数は多いですがほぼ同様の原理で照射されます。遠く水平に近い照射位置ほど楕円形状になっていく”光の円”を「スポット径」と呼び、スポット径が大きくなるほどその点がなにを捉えたデータかが曖昧になります(測定のノイズ)。
また、水や雪などへ照射、太陽光が強くあたる箇所なども正確な返しがされずノイズとなります。
計測可能範囲=利用可能な点群範囲ではなく、計測後こうした不良データを除外したり、計測の計画段階から標定点位置・器械移動位置をシミュレーションするスキルが求められます。
地上レーザースキャナーでは、水平・鉛直の両方向に回転しながらレーザー光を連続照射し、はねかえりまでの時間を距離に、レーザーの方向から角度を換算する方式(TOF方式’ タイムオブフライト方式’)、TSでも採用されレーザー光の波長の差から距離を、器械の回転量から水平/鉛直角を算出するフェイズシフト方式(位相差方式)により3次元点群のXYZ成分を収集します。
一般的に、TOF方式では長距離に強く、フェイズシフトでは近距離の高精度計測が得意とされており、メーカー・機種ごとに採用方式や測定精度が示されています。
機器の導入や利用にはこれらのスペックと業務仕様(マニュアル(案)など)から、最適な運用をすることが求められます。
空中移動計測・自動操縦
- UAV(ドローン)
- 空から広範囲に 3 次元計測が可能。高架橋の検査や災害時の現状把握など、人が簡単に立ち入れない可能性のある場所でも上空からカバーできます。

工業製品 形状測定・検査
- ハンディ型 3D レーザースキャナ
- デスクワークで工業製品の 3 次元形状データを収集したり、非接触検査や歯科治療などにも 3 次元計測は使われています。
水中設置・移動計測型
- 水中 3D レーザースキャナー
- 水中の地形や構造物(港湾施設やダム・魚礁・文化財など)を計測。水中での遠隔操作ができたり、混濁時にも計測できます。
レーザー照射により目標物までの距離や角度、色の情報などが収集できます。
収集された1つ1つの要素(Point)は計算によって(X,Y,Z)の空間位置が決まり、RGBの色情報を持った「点」です。
※必ずしも色情報があるわけではありません。
こうした3次元計測機器で大量に収集した「点の集合体(群れ)」が3次元点群です。