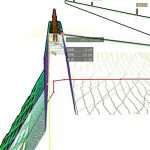
WingEarthの「グラウンドフィルタリング」で、車の集まりをグループ化した後、表示をOFFにする例です。
フィルタリング領域は、多角形や四角形、フリーハンドなどを組み合わせた指定ができます。
たくさんの「車」の点群と地表面を分けた推定により、「車」の点群のみのグループが作成できます。
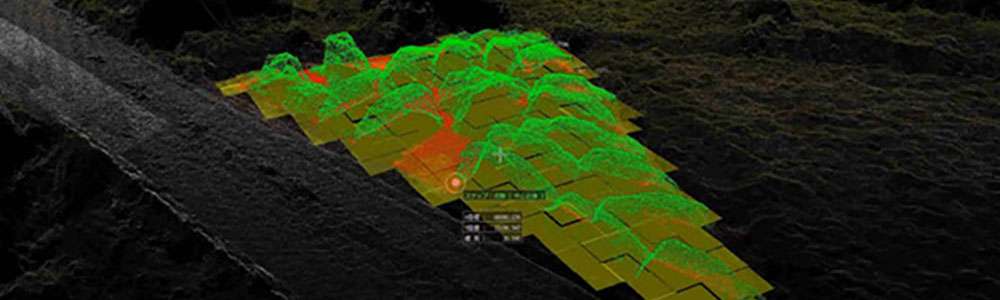
グラウンドフィルタリング〜UAV計測と自動車の除去〜
駐車車両とは違い、車両が‘より密集した状態’での「グラウンドフィルタリング」例です。
UAV(ドローン)による計測であるため、上から見た点群はきれいに見えますが、横から見ると物体が浮遊していたり、ポイントごとに高さにばらつきがみられる傾向にあります。
HINTS
グラウンドフィルタリングには、「地表面の厚み」の数値設定もできます。
この場合は“地表推定から10cm以上 上の点群をノイズとして扱う・除去する”設定でフィルタリングし、ポイントごとの高さの‘ばらつき’について、まとめて除去しました。
PROS
グラウンドフィルタリングには、「地表面の厚み」の数値設定もできます。